Kurs Django Robot – #1 – Konstrukcja
Posted on: August 7, 2024
Kurs Django Robot – #1 – Konstrukcja
Budujemy z recyklingu?
Podstawa
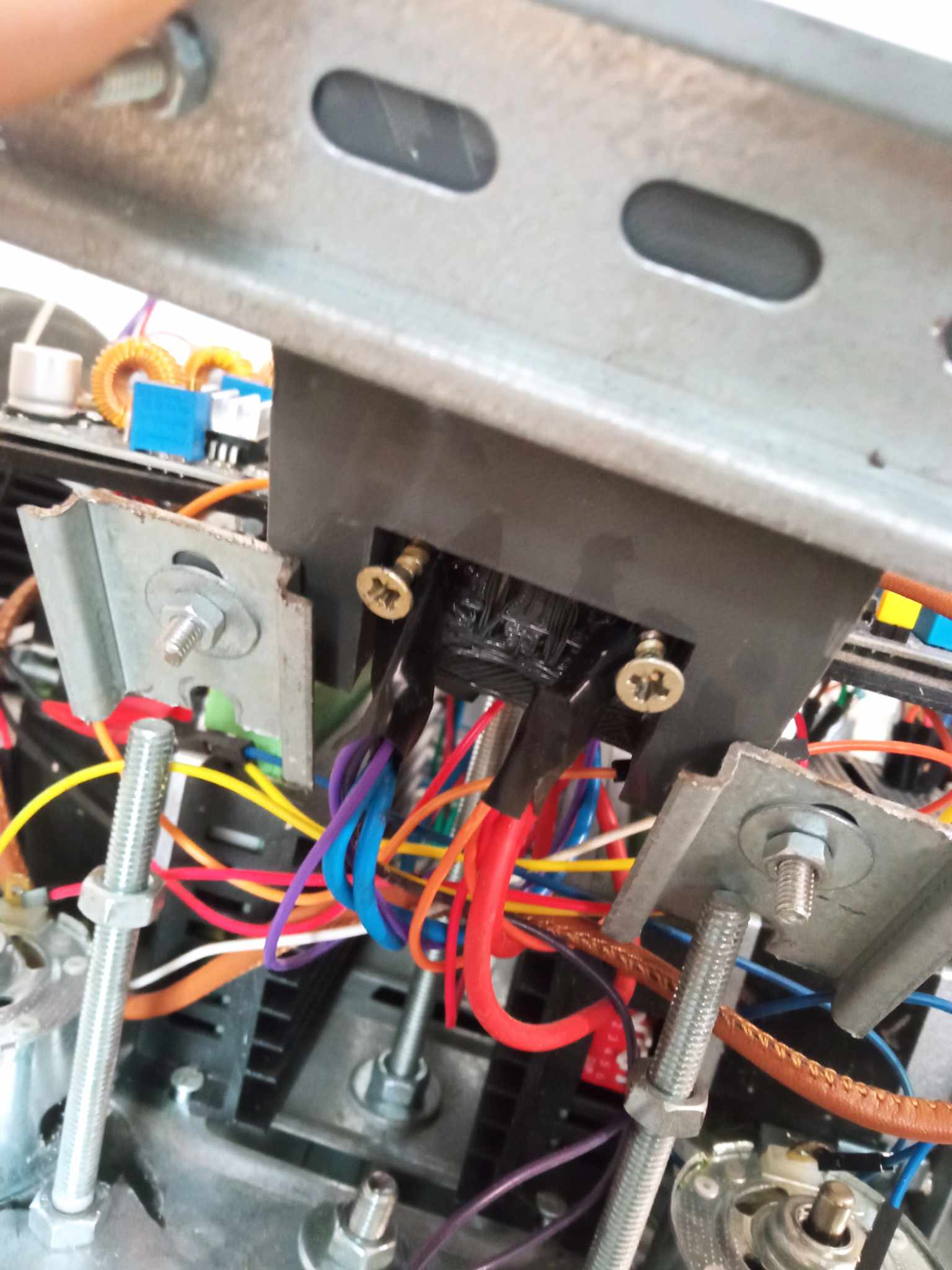
Głównym elementem naszej konstrukcji jest metalowa płyta, która służy jako podstawa do mocowania wszystkich innych składników. Kluczowe jest, aby podstawa była stabilna, umożliwiała łatwe montowanie komponentów i jednocześnie była jak najlżejsza. Doskonałym wyborem okazał się fragment kanału kablowego, powszechnie stosowanego w przemyśle do układania kabli. Ten kanał nie tylko jest wytrzymały i tani, ale także posiada mnóstwo otworów, które ułatwiają montaż dodatkowych elementów. Aby jeszcze bardziej wzmocnić konstrukcję, zastosowaliśmy profil aluminiowy, który został przymocowany od spodu za pomocą śrub T-owych. Aha, mała ciekawostka - wykorzystaliśmy części, które zostały nam po instalacji fotowoltaiki. Ciekawe, co jeszcze można z nich zrobić, prawda?
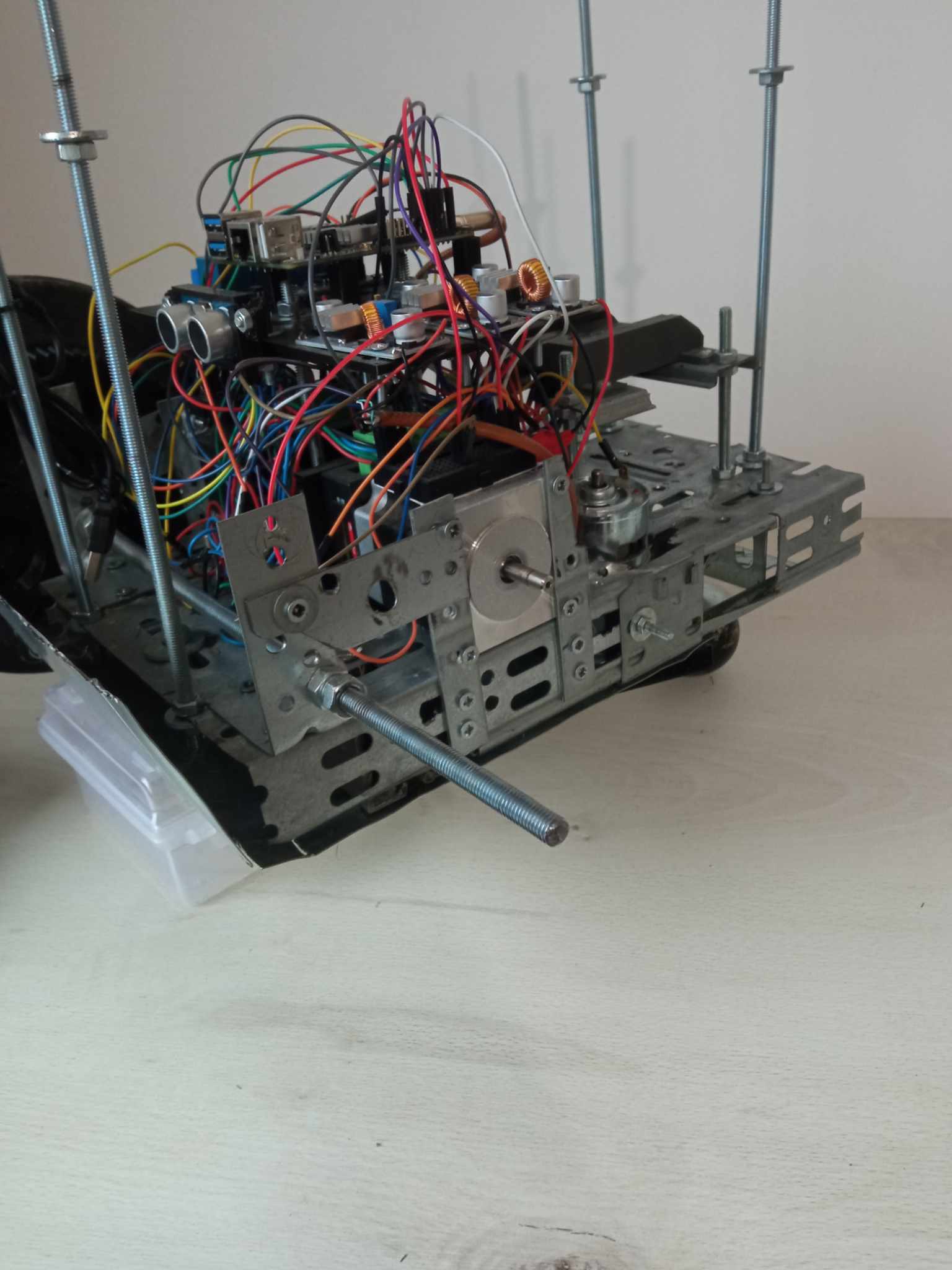
Jak widać, nasza konstrukcja została pocięta jak tylko się dało, oczywiście w ramach testowania różnych kombinacji :D
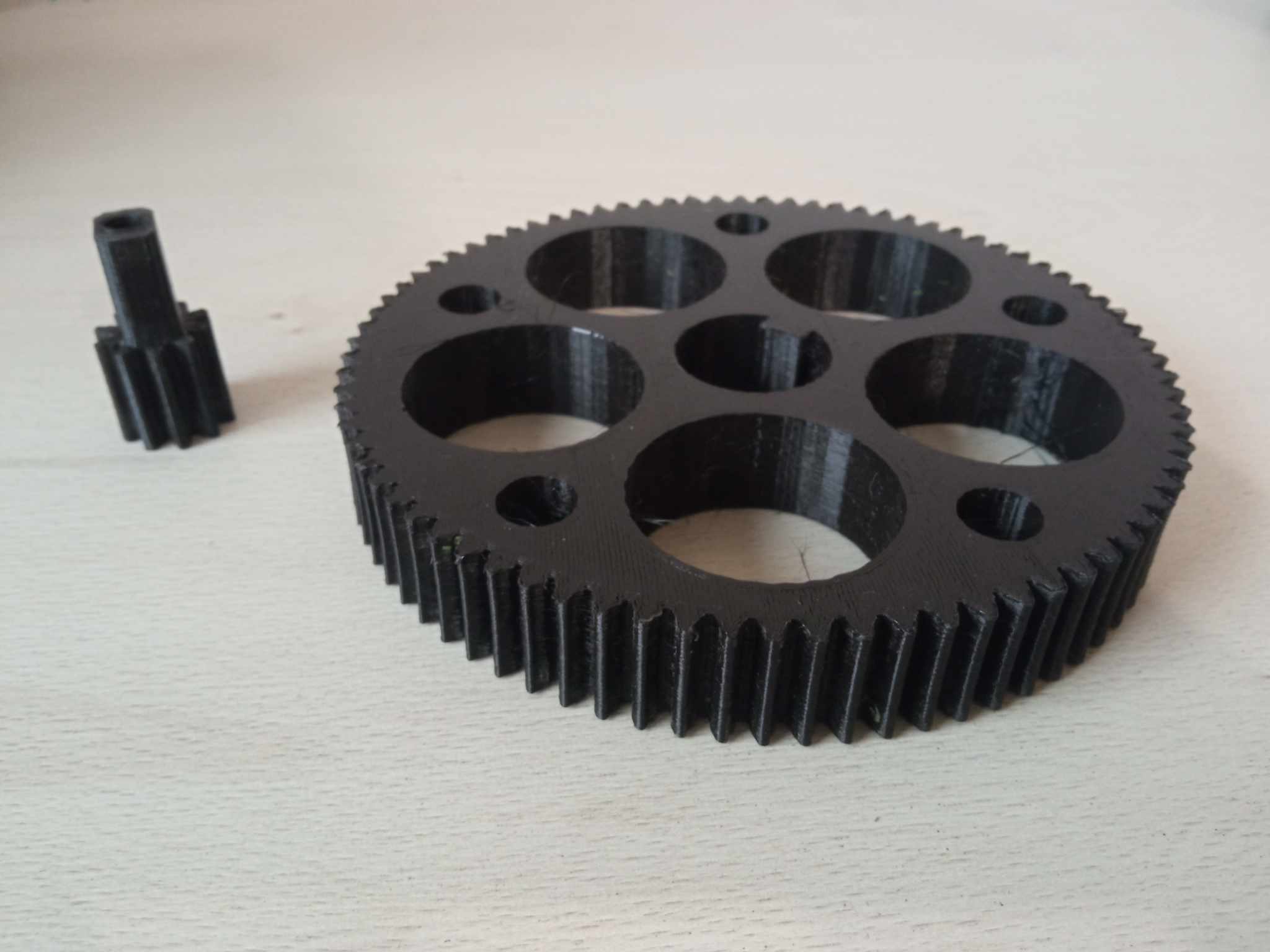
Reduktor
Kiedy zaczynaliśmy projekt, mieliśmy na oku pewne silniki krokowe, które już wcześniej zdobyliśmy. Choć miały moment trzymający o wartości 1 Nm, intuicja podpowiadała nam, że to może być niewystarczające. Więc, co zrobić? Postanowiliśmy dodać przekładnię, aby zwiększyć ten moment.
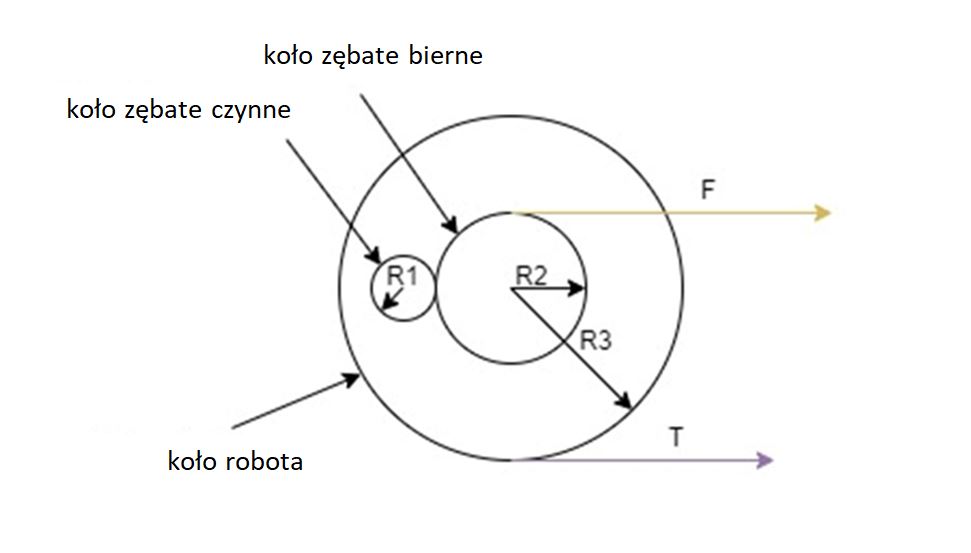
Dla niewtajemniczonych: koło czynne to element napędzany przez silnik, podczas gdy koło bierne zwiększa moment obrotowy, kosztem prędkości obrotu. Teraz trochę fizyki dla smakoszy! Aby nasz robot mógł się poruszać, musieliśmy zadbać o równowagę momentu obrotowego. W skrócie: siła F * promień R2 musi być równa siła T * promień R3.
Oszacowaliśmy parametry naszego robota:
Masa: 10 kg
Promień koła (R3): 100 mm
Maksymalny współczynnik tarcia tocznego dla gumy (f): 0,35 mm
Przyjmując obciążenie na jedno koło jako połowę masy robota, uzyskujemy siłę tarcia tocznego (T) równą 17,5 N (W = masa * przyspieszenie ziemskie, T = f * W = 0,35 * 50 N = 17,5 N). Ostateczny moment wynikający z tej siły to 1,75 Nm (siła razy ramię, czyli 17,5 N * 0,1 m). Wybraliśmy przekładnię o stosunku 1:8 (duże koło zębate ma 8 razy więcej zębów), co w teorii daje nam moment około (biorąc zapas niedokładności w modelu matematycznym) cztery razy większy niż wynikało z obliczeń. W praktyce okazało się to wystarczające, chociaż czasem koła mają tendencję do blokowania się na nierównych powierzchniach. Może w przyszłości zwiększymy moment? Albo udoskonalimy konstrukcję? Kto wie!
Aha, jeszcze jedno: nasze koła zębate zostały starannie wydrukowane z ABSu przy użyciu technologii druku 3D. Czyż to nie jest niesamowite?

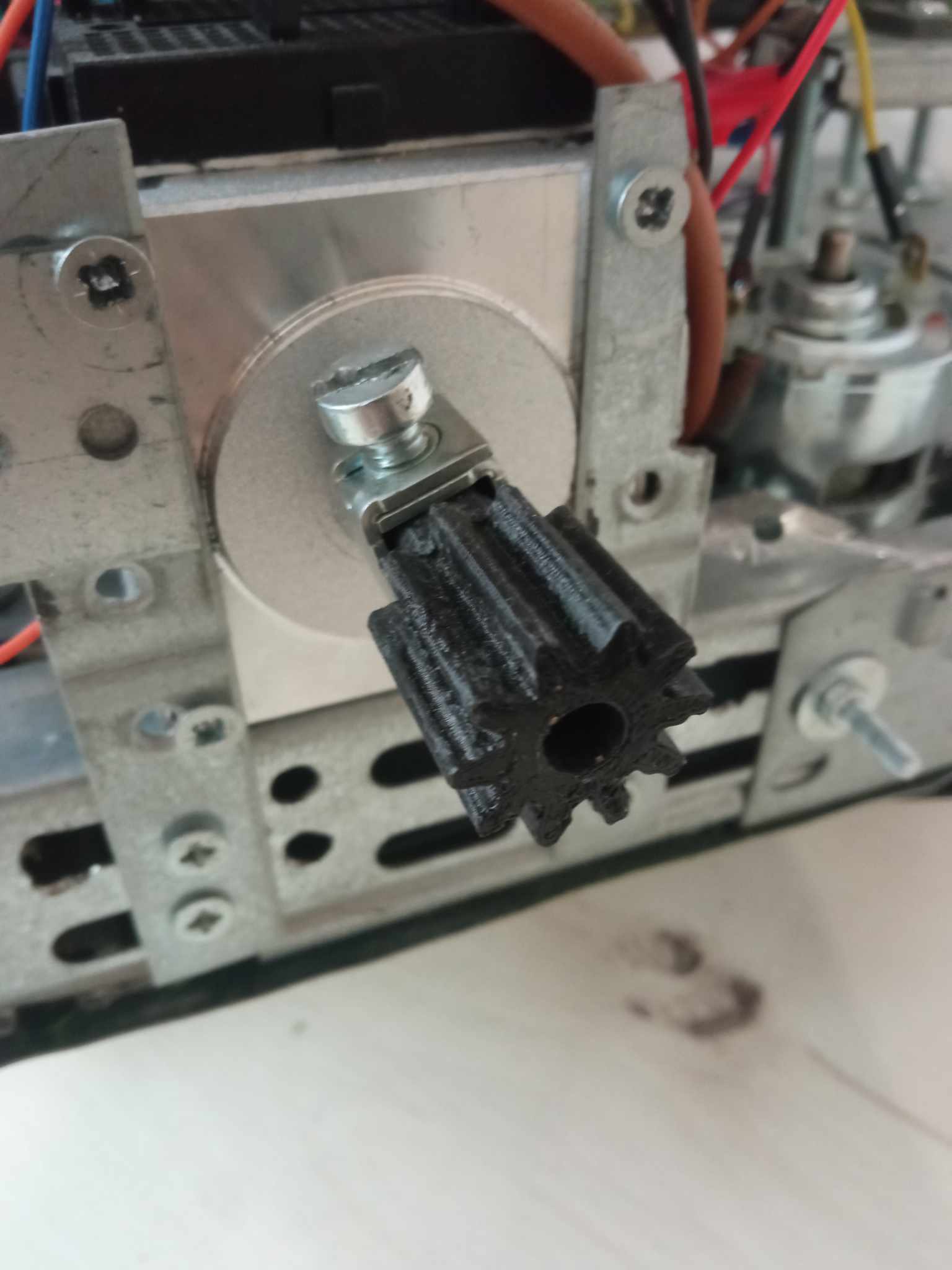
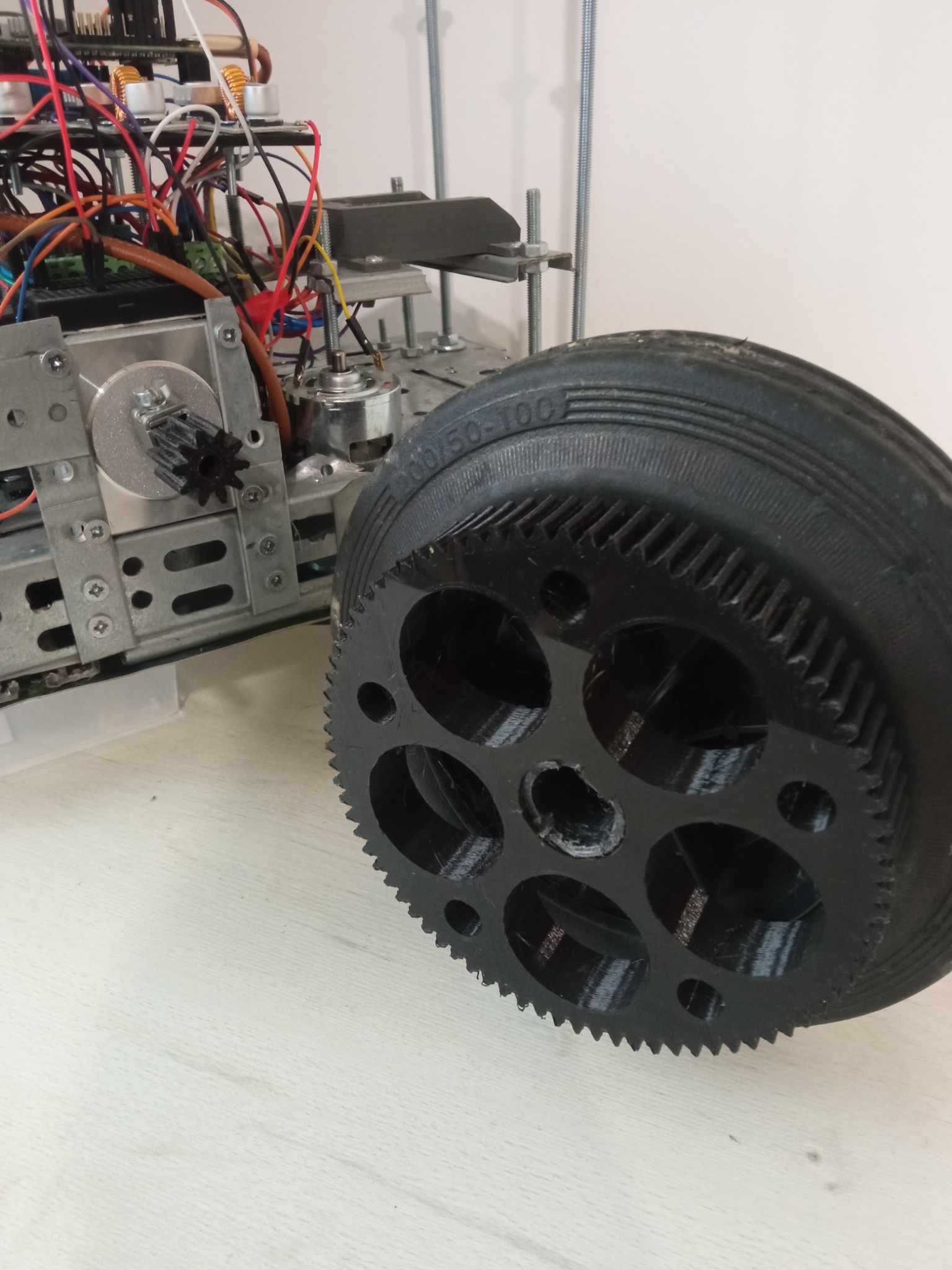
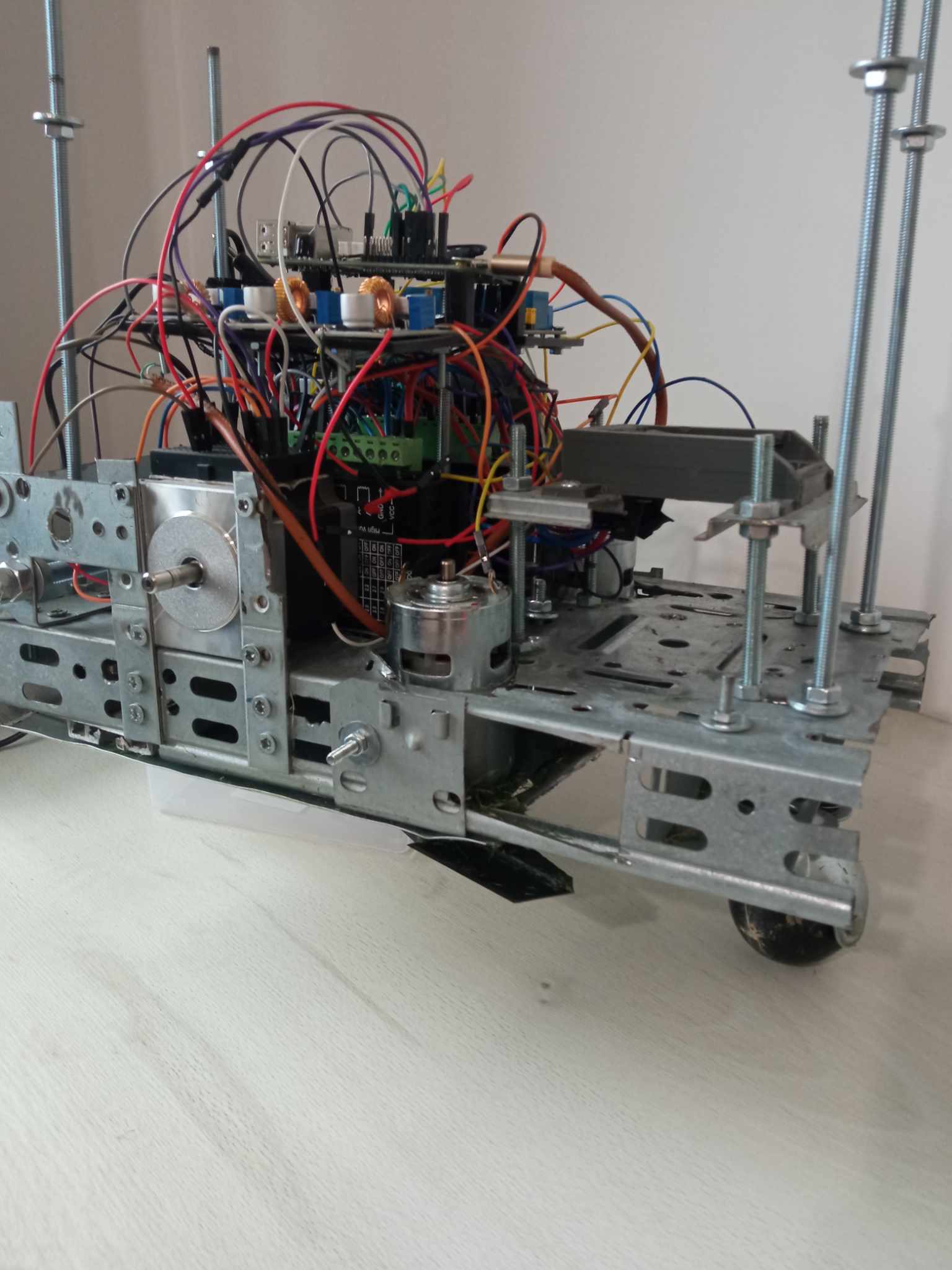
Montaż kół
Kiedy przystąpiliśmy do montażu kół, postawiliśmy na solidność. Użyliśmy pręta gwintowanego, kątowników oraz całą gamę różnorodnych śrub i nakrętek. Zaskakująco, naszym wyborem na koła były ekonomiczne koła do pojemników na odpady. Udoskonaliliśmy je, dodając łożyska i wydrukowany stabilizator. Efekt? Robi wrażenie! Co więcej, czynne koło zębate na wale silnika krokowego utrzymuje się stabilnie dzięki dociskowi specjalnej śruby.

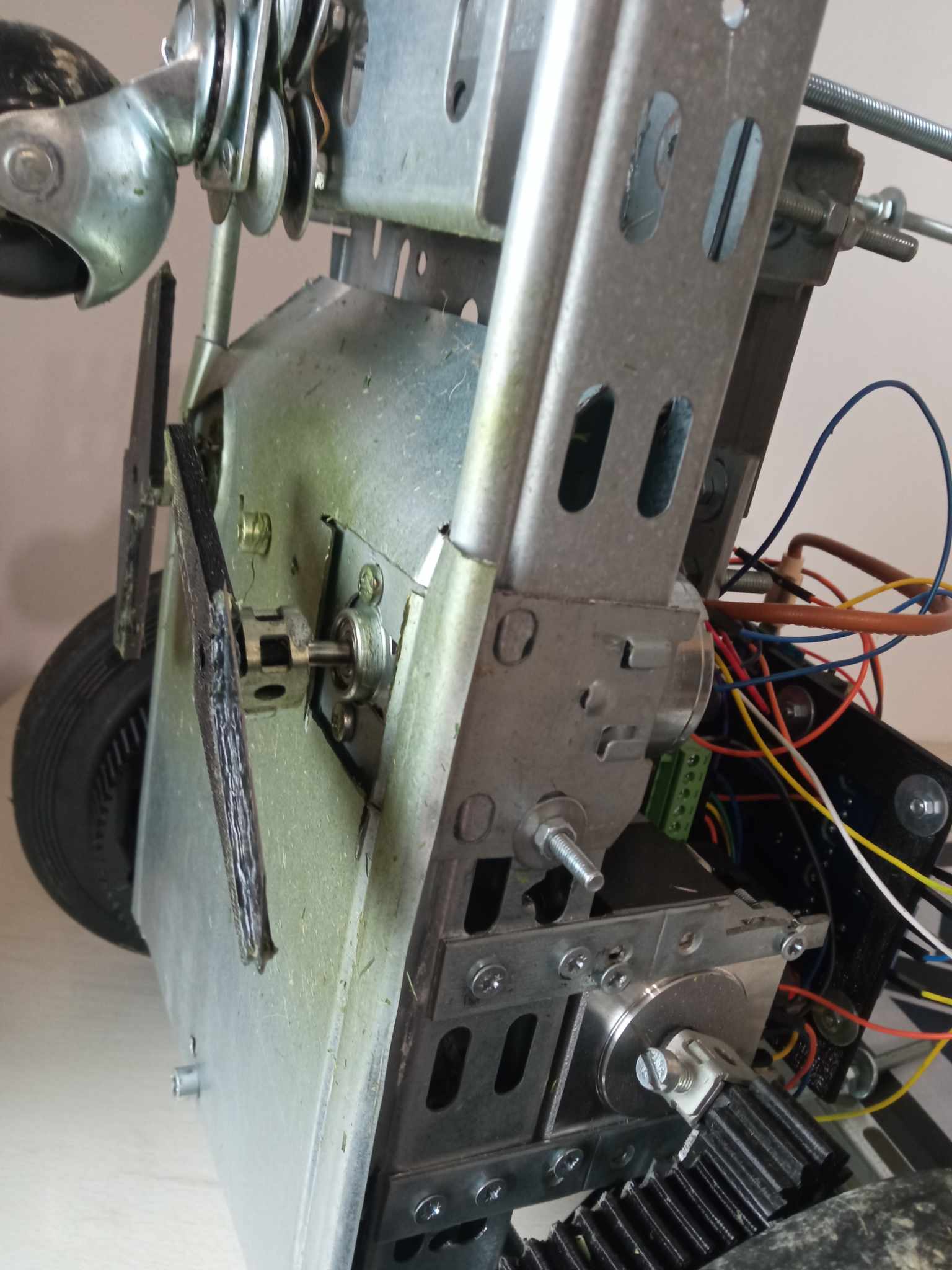
Kosa
Jeśli chodzi o dolne noże, zdecydowaliśmy się na kreatywne wykorzystanie noży do tapet. Połączyliśmy je z wydrukowanymi ramionami, a następnie przytwierdziliśmy do wałów silnika, również korzystając z docisku śruby.

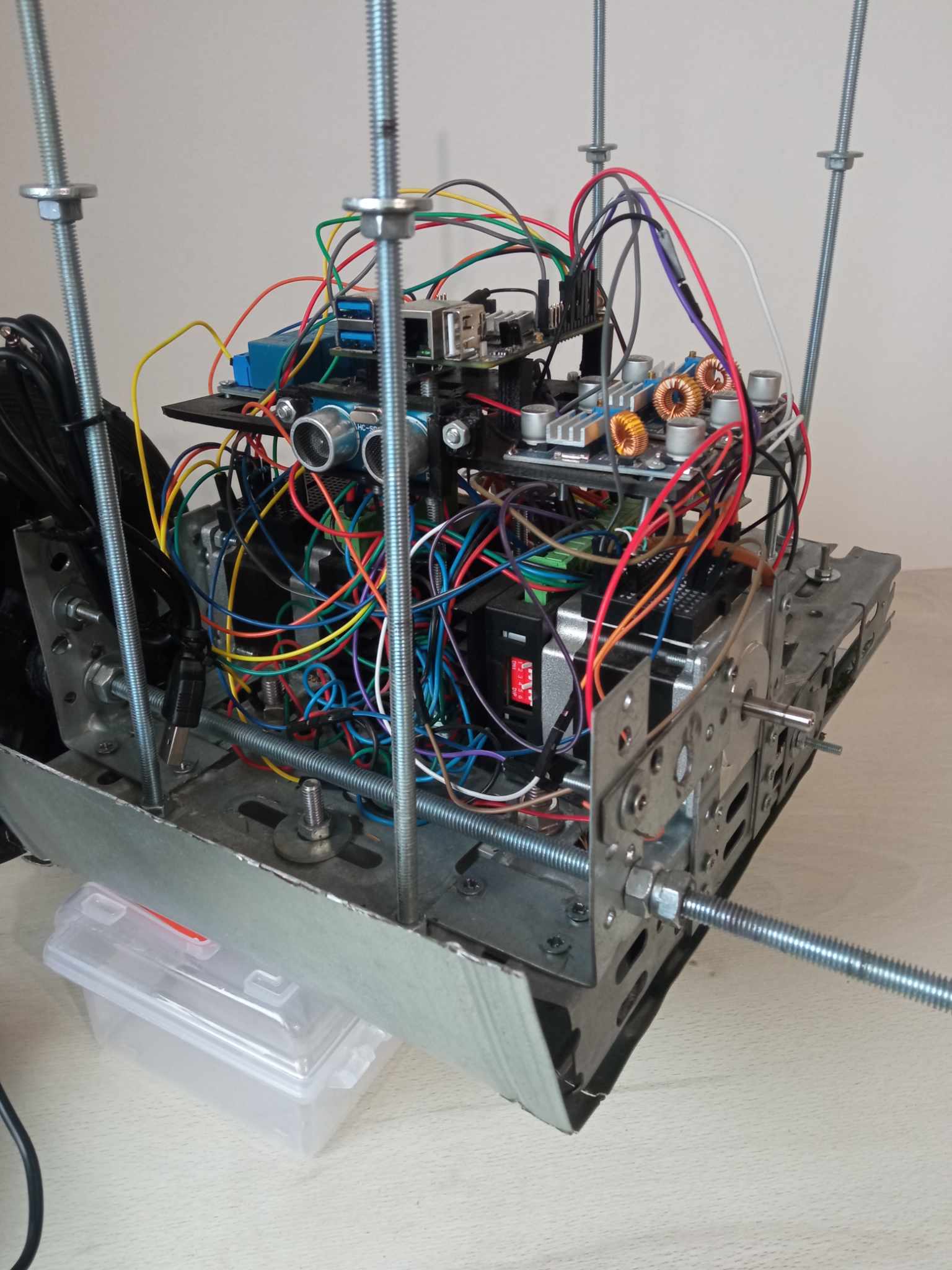
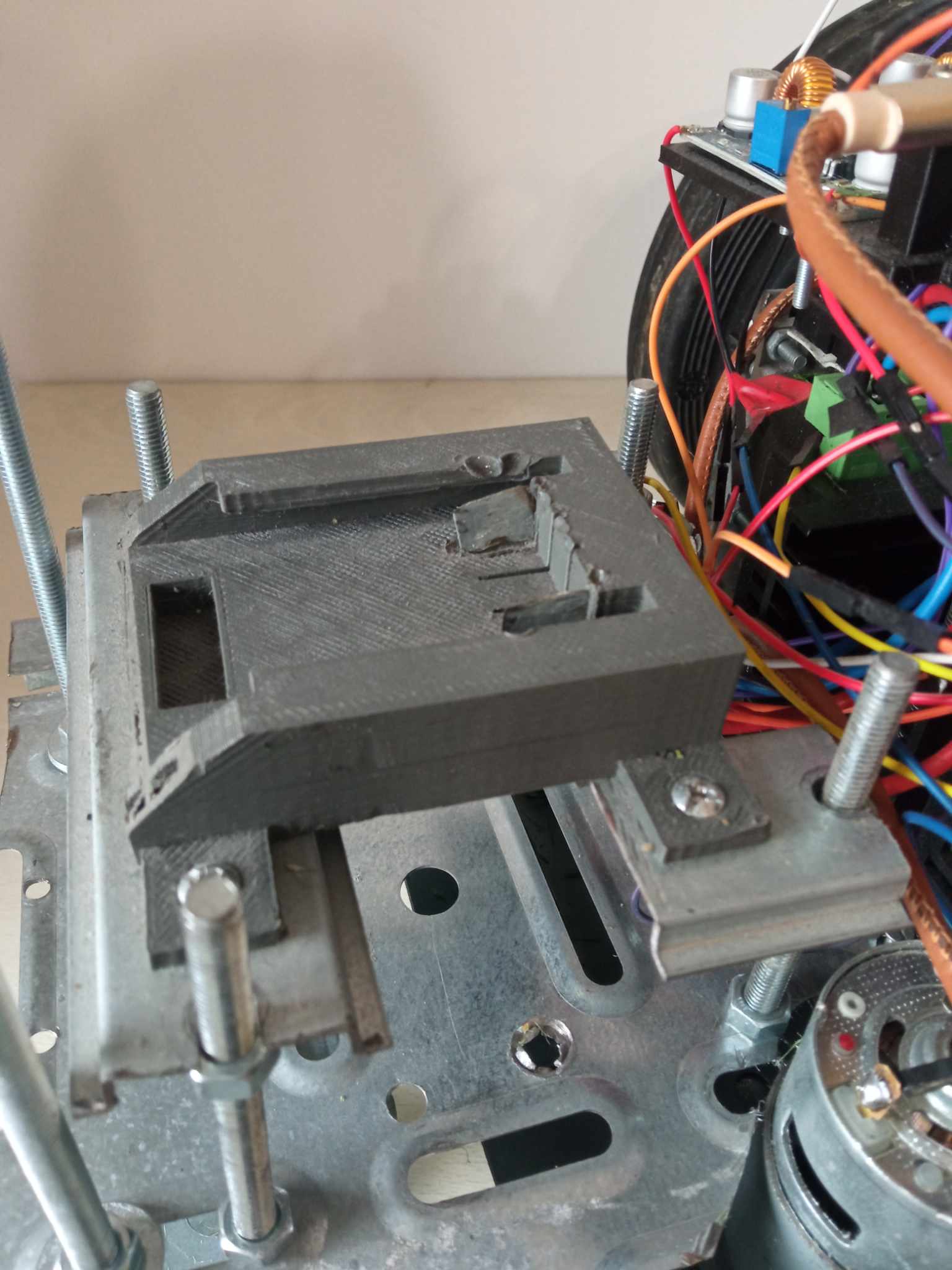
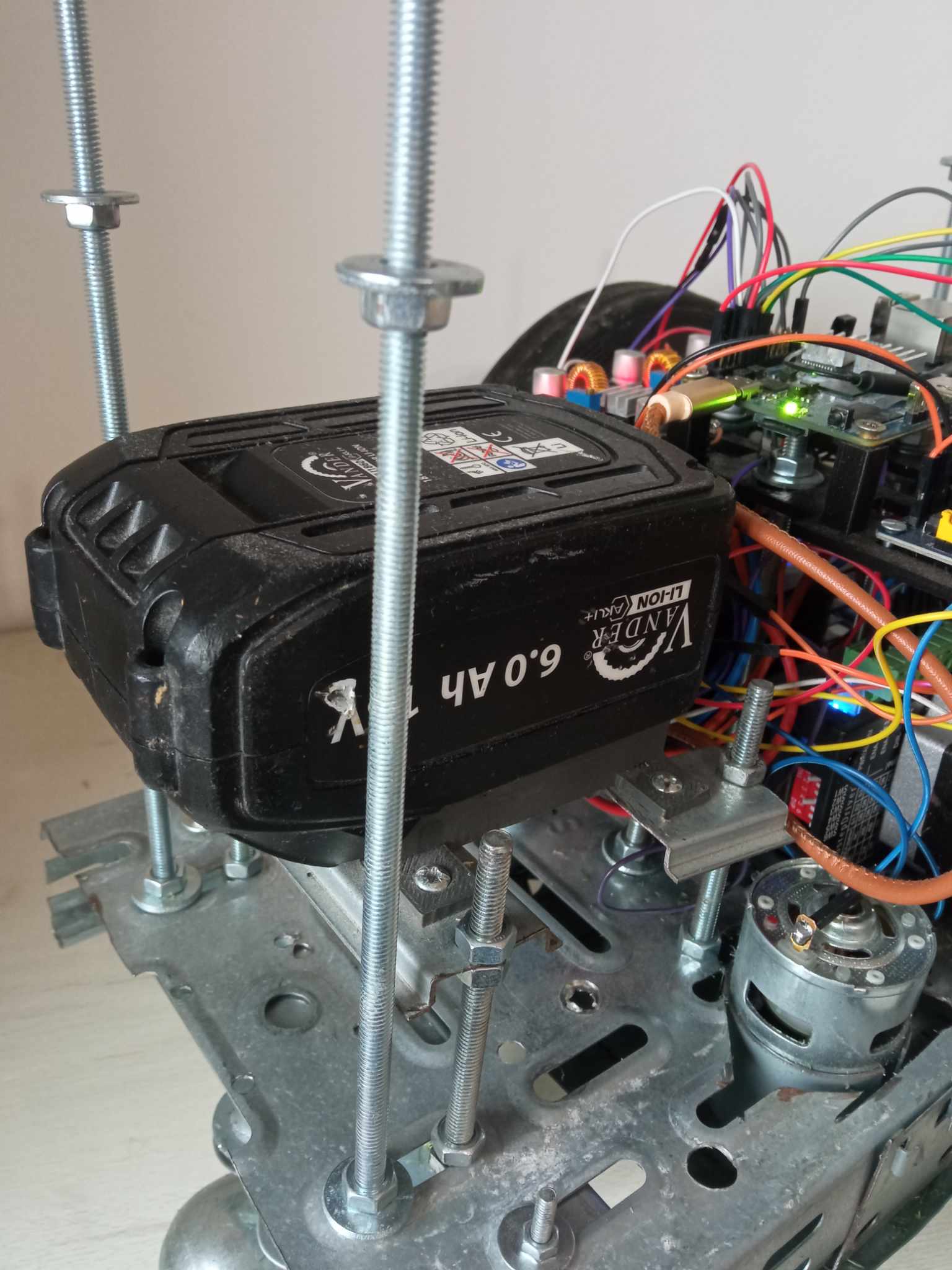
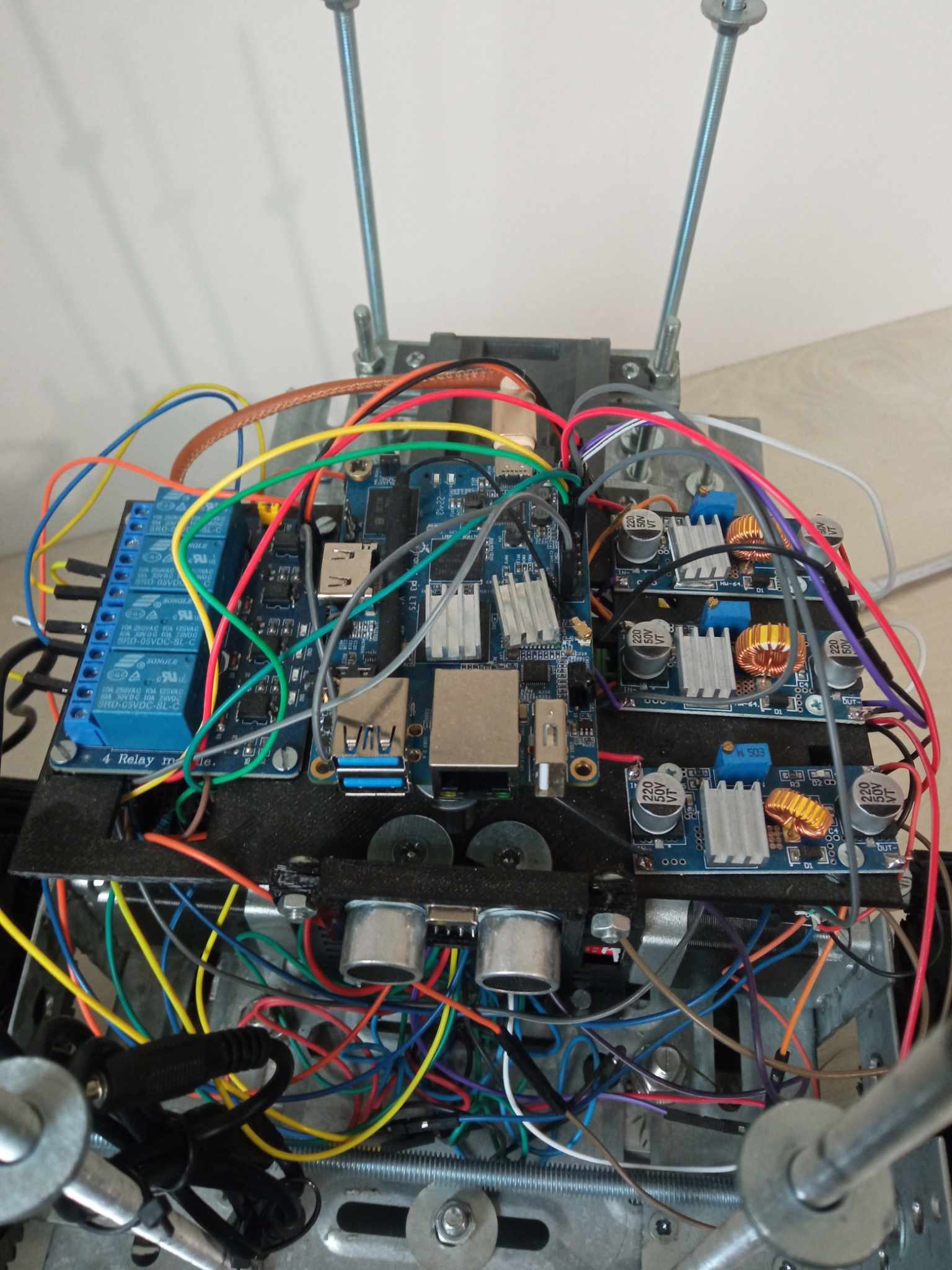
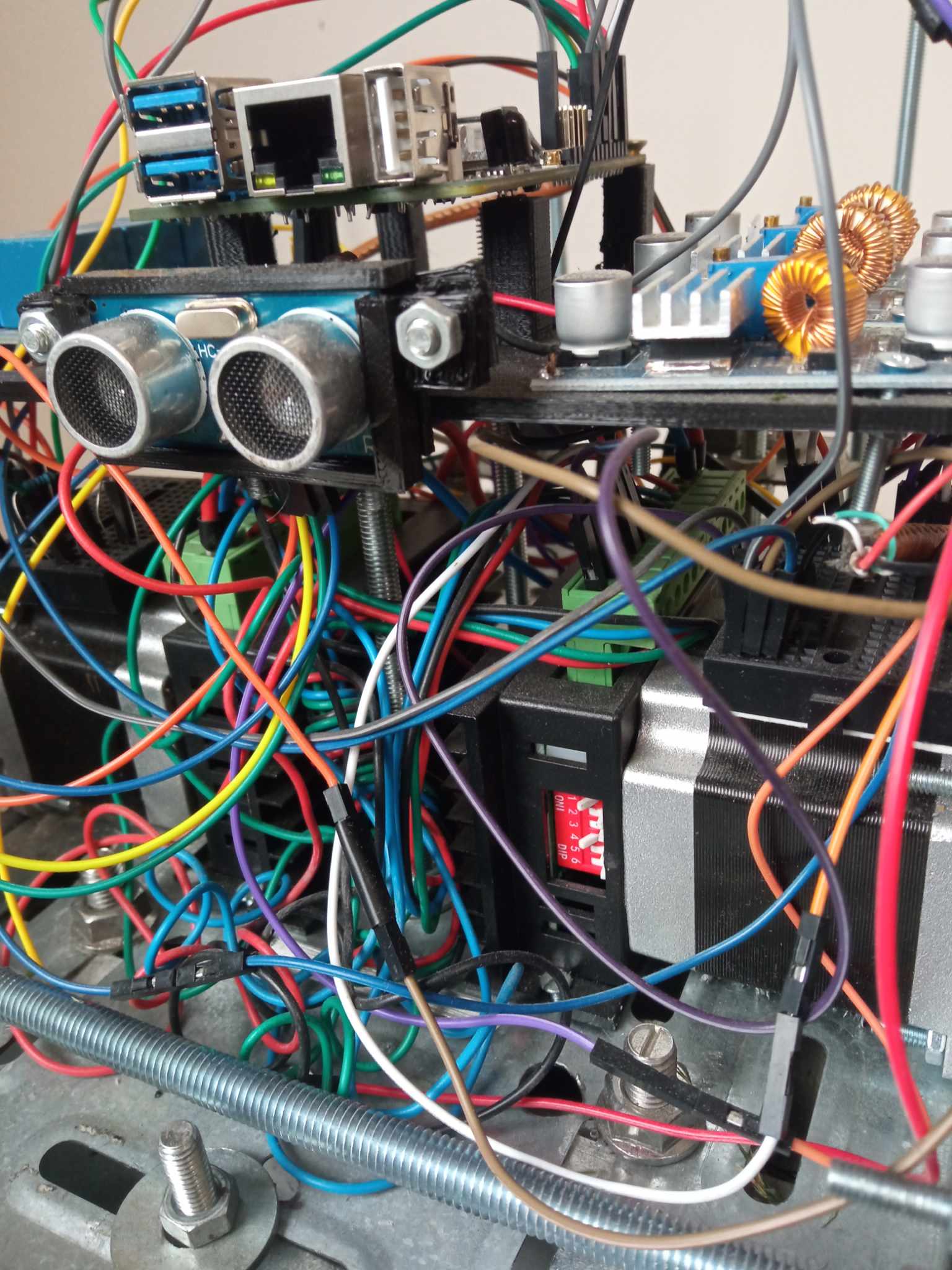
Umocowanie elektroniki
Nasza konstrukcja zawiera również specjalnie zaprojektowaną platformę dla Orange Pi 3 LTS oraz pozostałej elektroniki. Dodatkowo, przygotowaliśmy dedykowany podest dla akumulatora, uwzględniając wymiary ładowarki. Do podestu dokręciliśmy dwie metalowe blaszki, do których przylutowaliśmy odpowiednie kabelki - plusy i minusy. Więcej na temat naszego wyboru akumulatora opowiemy w następnym rozdziale.
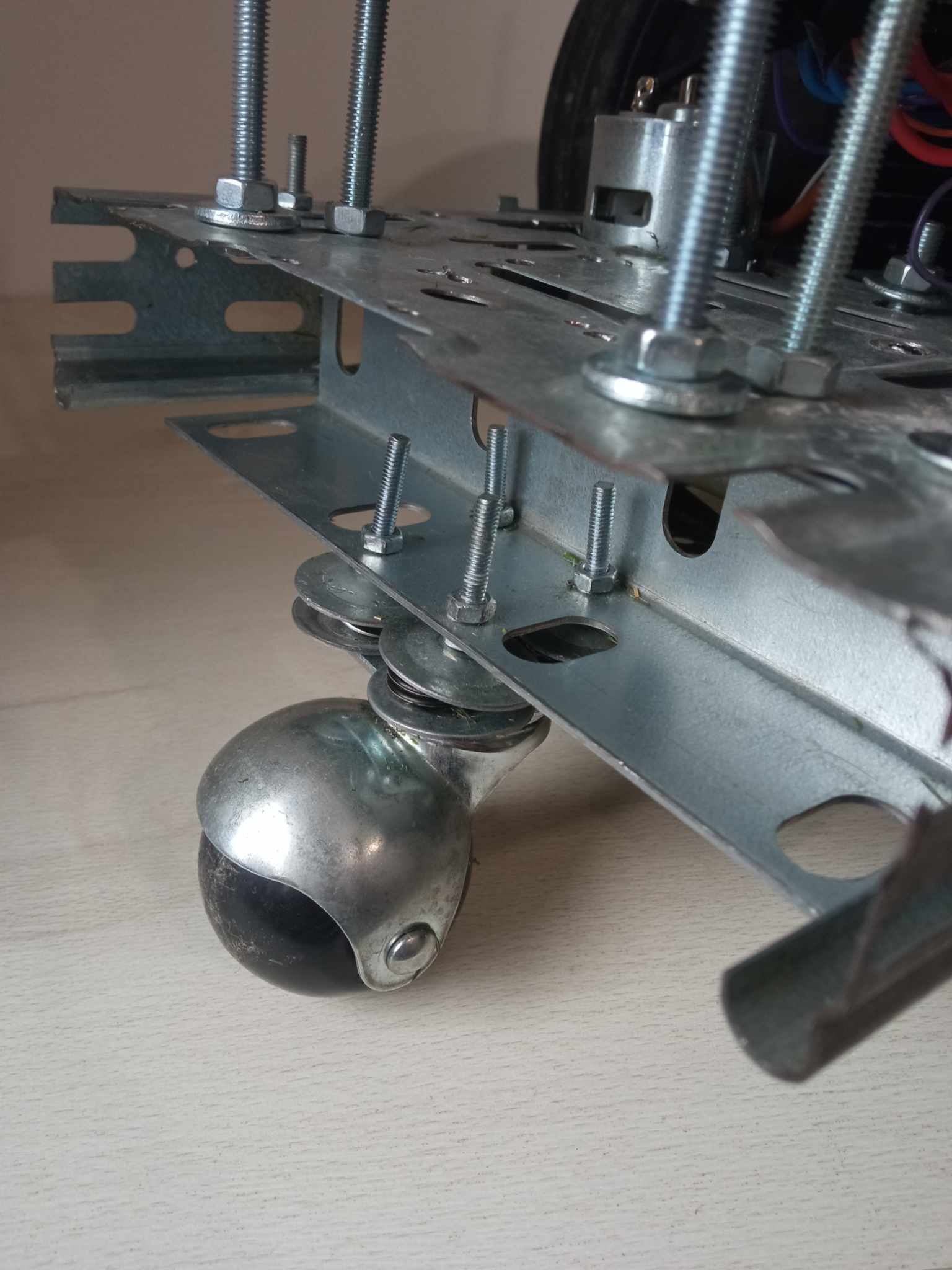
Trzecie koło u wozu
Nie możemy zapomnieć o trzecim kole - koło podtrzymujące, które może obracać się o 360 stopni. Dzięki niemu nasz robot zyskuje płynność w skręcaniu i możliwość stabilnej prostej jazdy.
Wykończenie
Całość została zabezpieczona przed potencjalnymi uszkodzeniami mechanicznymi. Od spodu jest przykręcona płyta, natomiast górną część osłania eleganckie koryto kablowe, do którego jest dokręcona kamera.


Poprawki
Z pierwszych rzeczy do poprawy, lepiej byłoby zastosować jeden mocniejszy silnik do koszenia trawy zamiast dwóch mniejszych, oraz zastanowić się nad odchudzeniem całego prototypu, zwłaszcza kół, zarówno przednich, jak i tego podtrzymującego.
A Ty, co myślisz o naszej konstrukcji?
Category: Kurs Django Robot